A Driver Model for Vehicle Lateral Dynamics
- Motivation and Objective
- the interaction between human driver and the vehicle is one of the major interests in active safety systems
- the driver model that behaves like real human drivers have been strongly demanded because it is useful for the development of active safety
systems or vehicle limiting-performance assessment
- Lateral Dynamics Characteristics of Vehicle
- Steer input -> Lateral accelerations, Yaw rate
- Lateral acceleration -> Roll angle
- Yaw rate -> Vehicle side slip
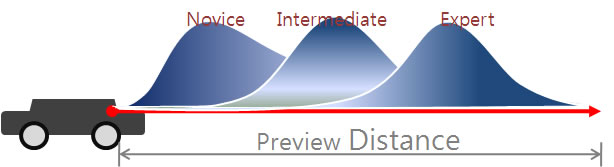
- Weighting Strategy
- Weighting strategy is conceived by utilizing multi-preview points and human drivers’ curvature adaptation characteristic.
- A block diagram of a driver model for vehicle lateral dynamics
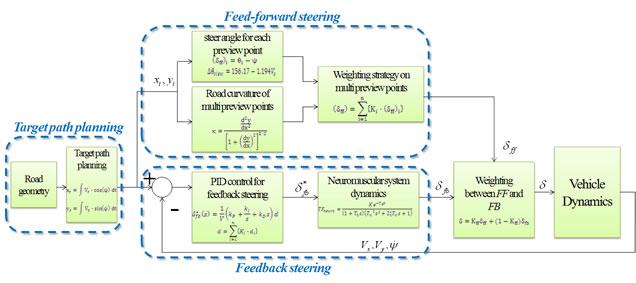
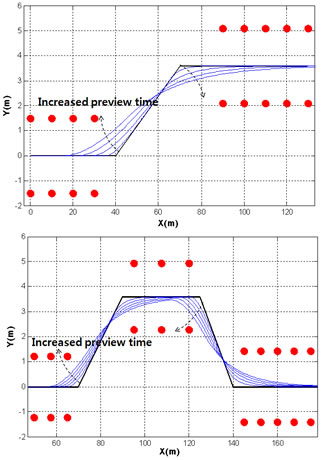
- Target Path Planning
- Target path is obtained in analogous to the planar motion of a rigid rod under holonomic constraints
- Feed-forward Steering
- Based on the vehicle-road geometric conditions
- The driver’s view angle is considered
- Feed-back Steering
- A PID type preview control scheme is considered
- The driver’s view angle is considered in feed-forward steering
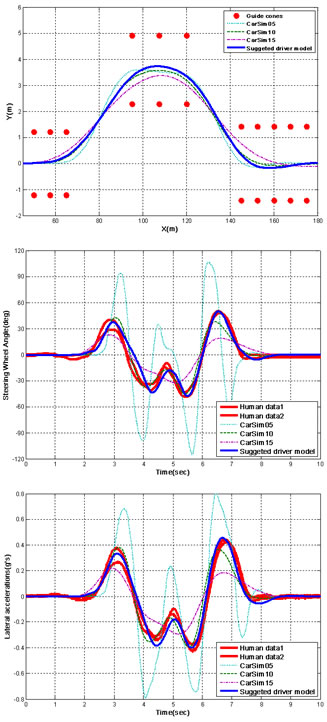
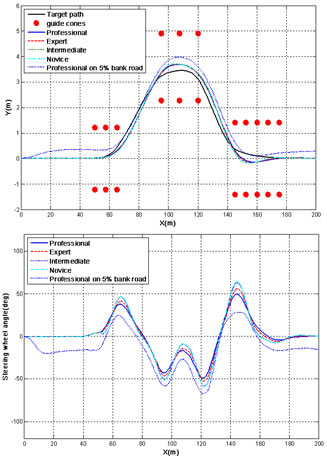
- Performance Test
- The suggested driver model is simulated with CarSim Vehicle model in Simulink environment
- The simulation results are compared to the actual vehicle test data and also to the driving simulator test data with regards to 4 levels of human drivers
- The driver model suggested in this study represents the human steering behavior and also matches well with the real vehicle test data